工程锻炼
-
 大模型离线具身智能导盲犬
大模型离线具身智能导盲犬
离线部署1.8B大模型于宇树Go1四足机器人,可引导盲人进出电梯、过马路、找房间。获2024书生·浦源大模型挑战赛全国总冠军。
2024/3/20[Video][GitHub] -
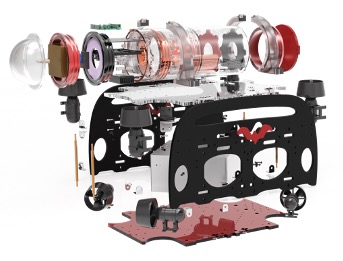 “北溟”水下作业机器人
“北溟”水下作业机器人
本项目提供了一种自主搭建AUV进行水下无人实验的低成本方案,包括动力系统、电源系统、底层控制系统和边缘计算系统。获中国机器人大赛暨RoboCup机器人世界杯中国赛全国总冠军。
2023/5/14[Video] -
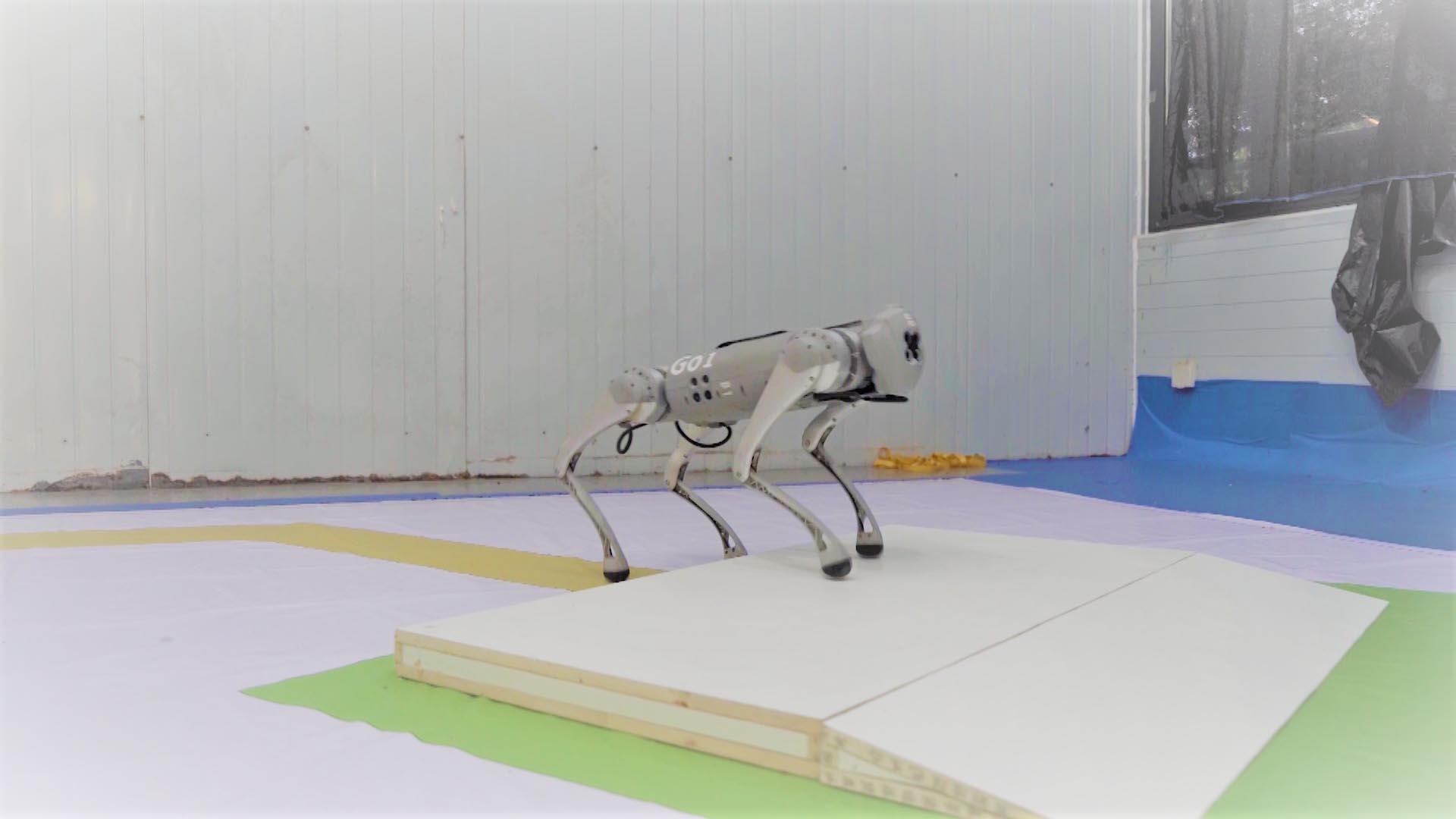 飞桨小汪:智能四足导盲机器人
飞桨小汪:智能四足导盲机器人
基于宇树A1/Go1四足机器人和百度飞桨框架实现盲道自主巡线、识别红绿灯并通过路口、自主避障等功能。获中国机器人及人工智能大赛全国总冠军、RoboCom机器人开发者大赛全国总冠军、中国大学生计算机设计大赛全国总冠军。
2022/8/23[Video][AI-Studio] -

-
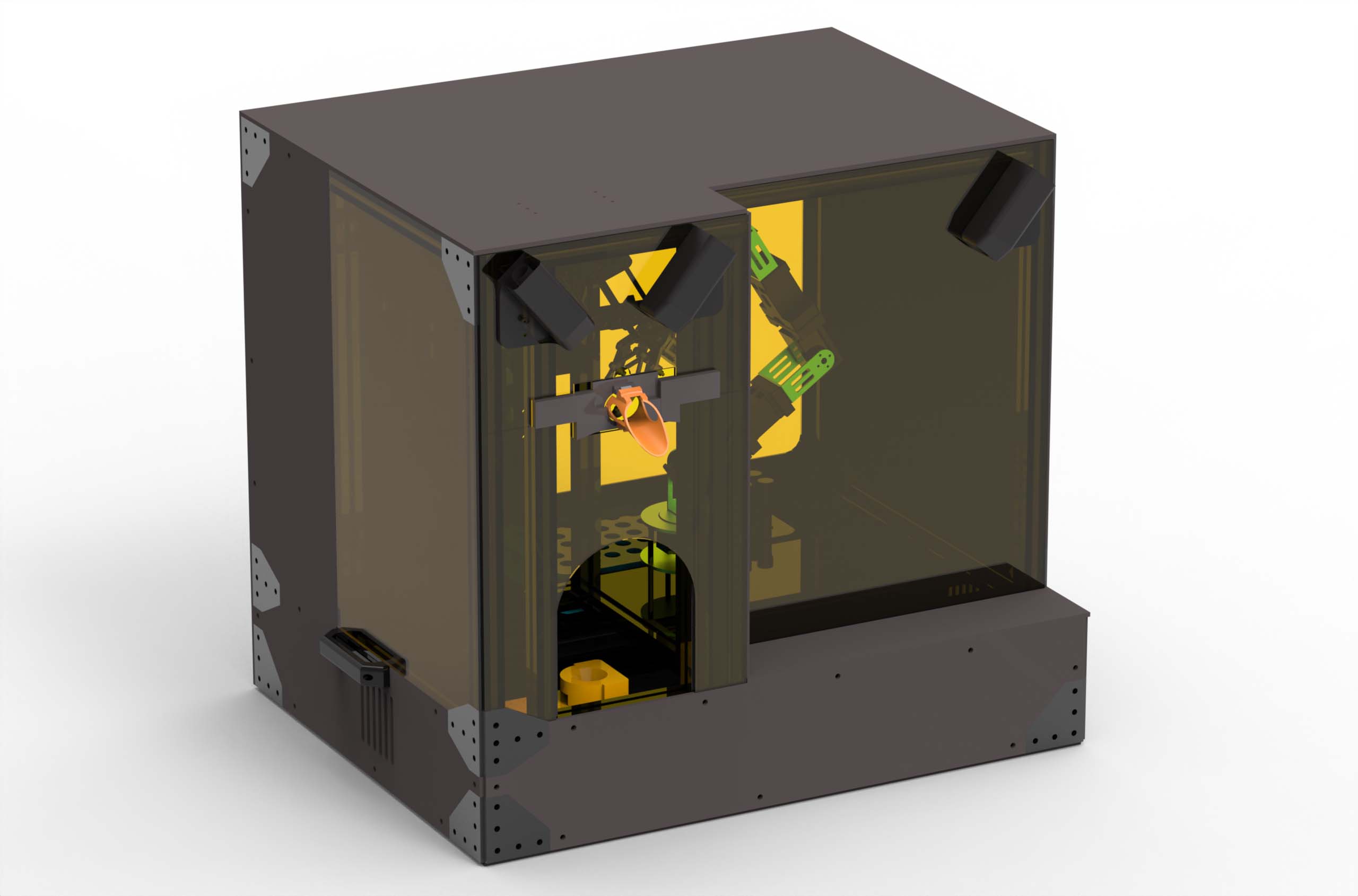 自动咽拭子采样机器人
自动咽拭子采样机器人
使用多机械臂协同,结合摄像头拍摄的口腔内部图像,采用视触觉多模态感知算法,适应不同人的口腔内壁环境采样。获中国大学生计算机设计大赛国家一等奖、“挑战杯”中国大学生创业计划竞赛国家三等奖、全国大学生光电设计竞赛国家三等奖。
2022/7/1[Video][Report]
底部导航 | 个人主页 | 科研探索 | 工程锻炼 | 成长印记
您是第位访客!本页访问量次,本站访问量次。
友情链接:
※ 企业导师: 中国电信人工智能研究院(TeleAI) | 李学龙教授 | 邵嘉伟老师
※ 博士导师: 西北工业大学-光电与智能研究院(iOPEN) | 李学龙教授 | 孙哲副教授
※ 本科导师: 大连海事大学-人工智能学院 | 刘洪波教授 | 张博副教授
Coder.AN © 2023-2024, All Rights Reserved. Email: an.hongjun@foxmail.com